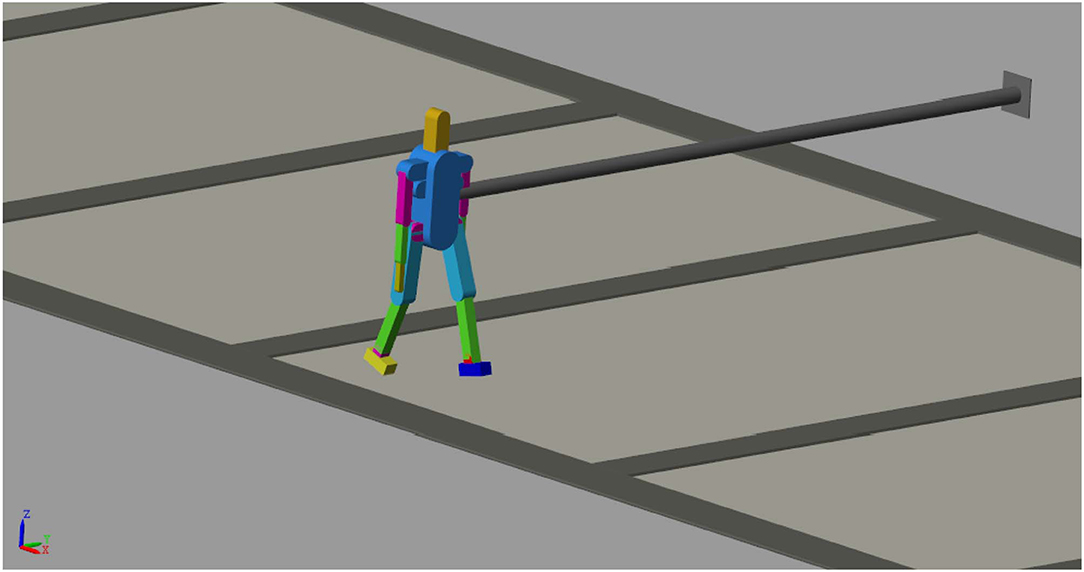
Frontiers Gait Optimization Method for Humanoid Robots Based on

Figure 1 from Bipedal Hopping: Reduced-Order Model Embedding via
Frontiers Closed-Loop Torque and Kinematic Control of a Hybrid
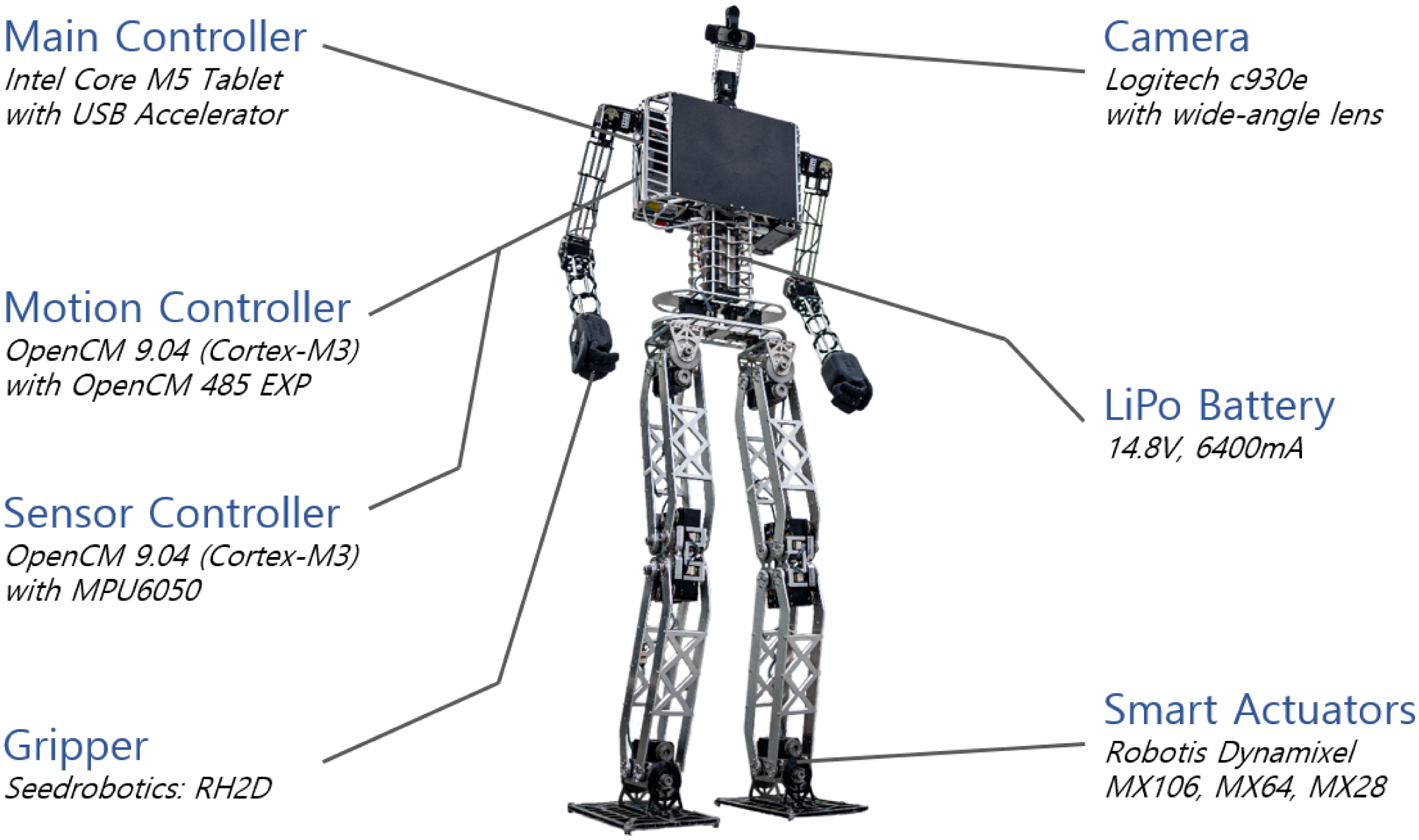
Lightweight mechatronic system for humanoid robot
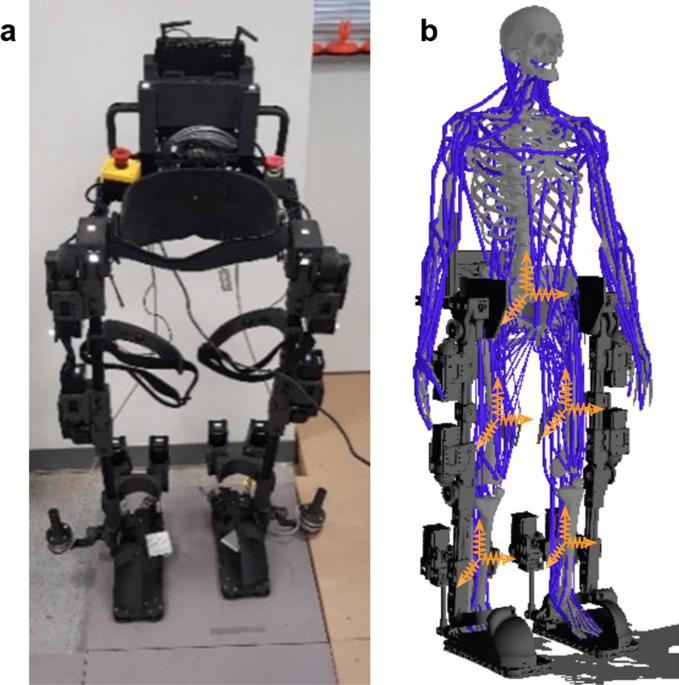
Robust walking control of a lower limb rehabilitation exoskeleton
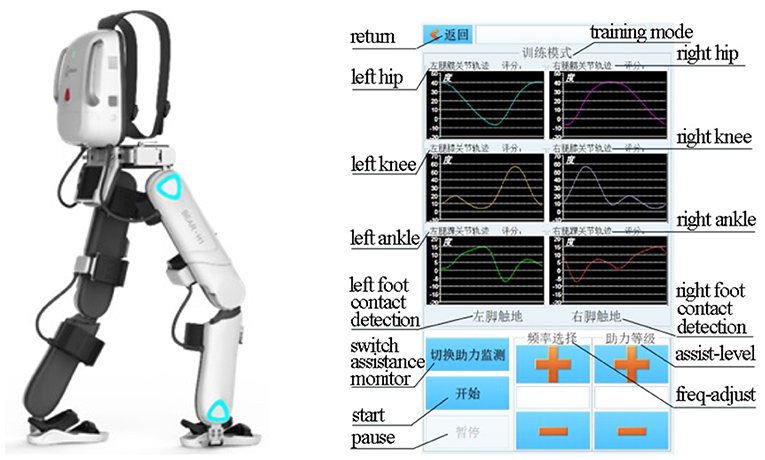
Frontiers Effects of Individualized Gait Rehabilitation Robotics
Frontiers Pronto: A Multi-Sensor State Estimator for Legged
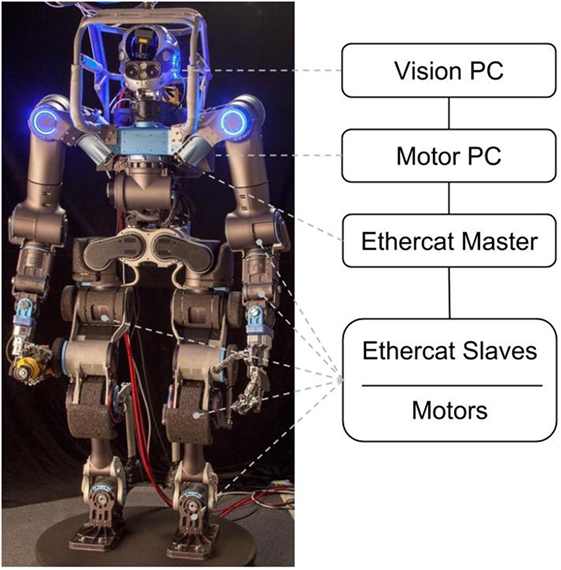
Frontiers The Walk-Man Robot Software Architecture
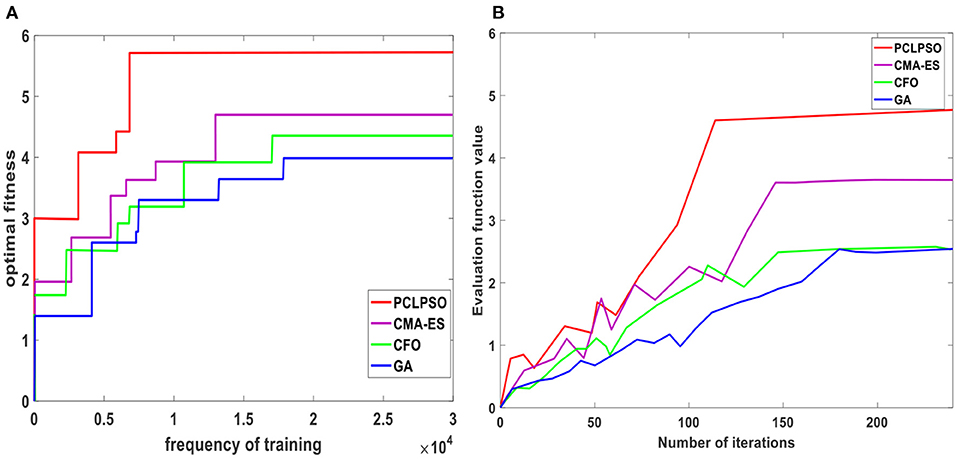
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Biped Robots With Compliant Joints for Walking and
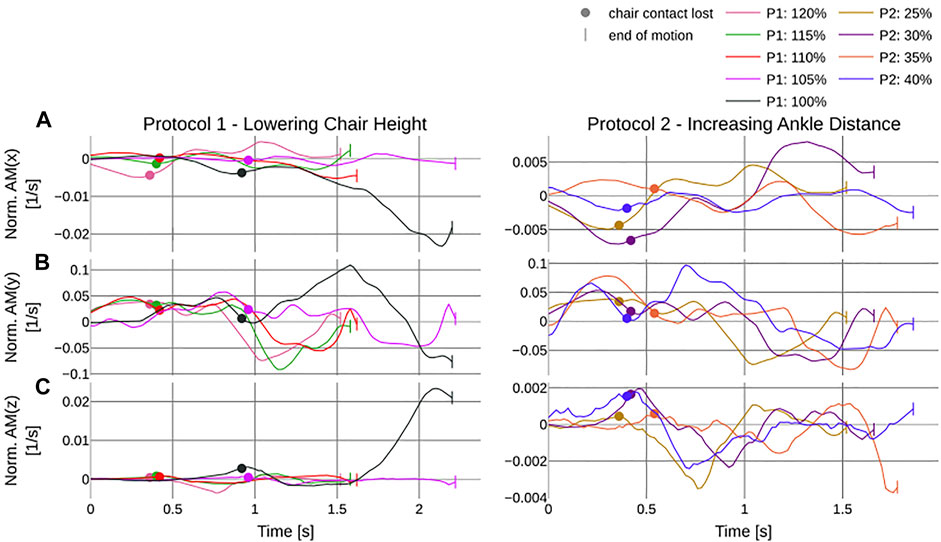
Frontiers Optimization of Dynamic Sit-to-Stand Trajectories to
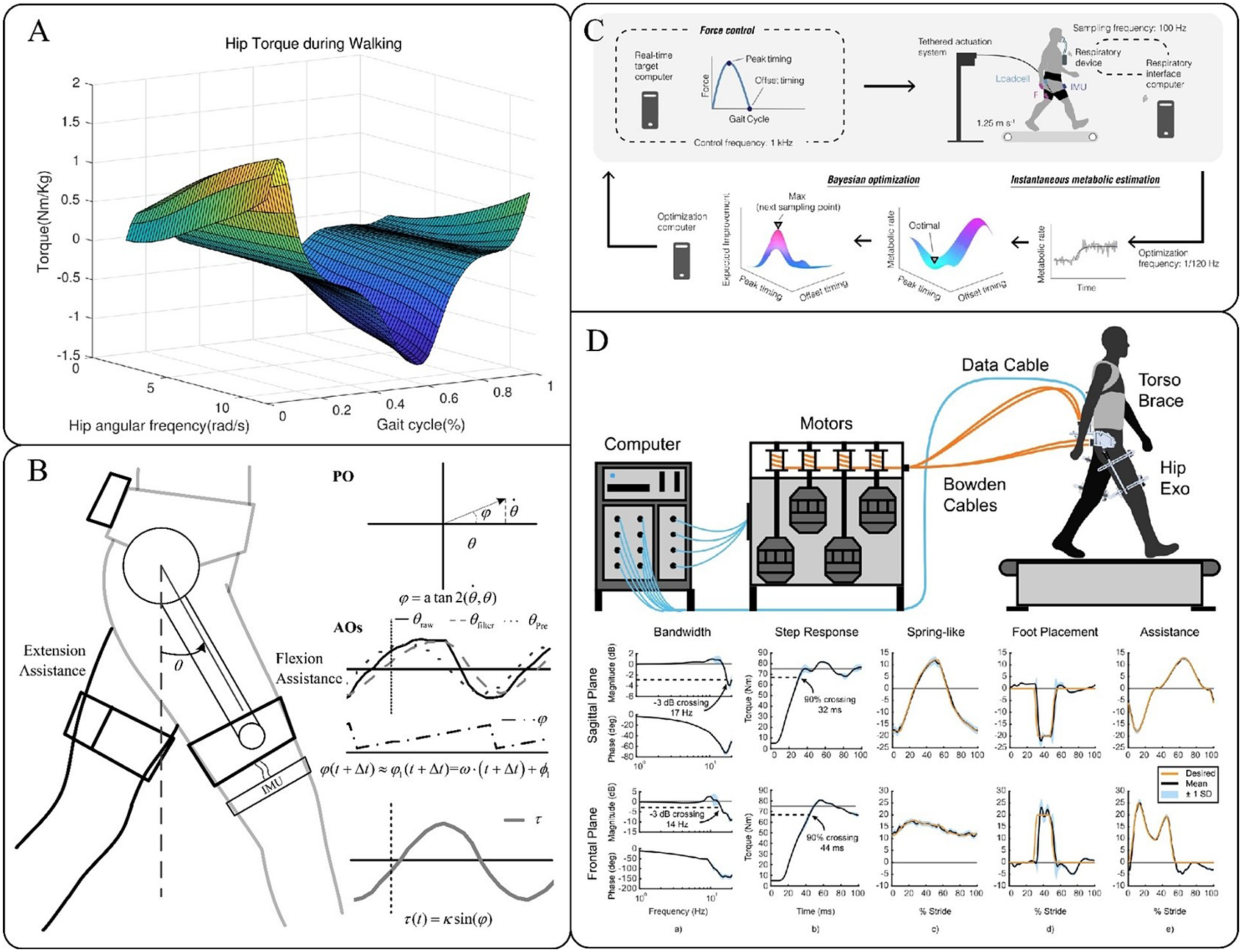
Current developments of robotic hip exoskeleton toward sensing
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on